- Window 10
- Ublox ZED-f9p
- U-Center v22.02
1. U-Center 설치
U-Center를 여기에서 다운로드한다.
현재 GPS를 이용한 자율주행 자동차를 Linux 환경에서 개발 중이지만, U-Center는 Linux를 지원하지 않으므로 Window 환경에서 GPS 수신 주기만 변경해주었다.
Window가 아닌 Linux 환경에서 U-center를 사용하고 싶다면 Wine을 통해 사용 가능하다.
(Wine 설치 방법은 예전에 포스팅해두었으니 여기를 참고하면 된다.)
2. U-Center에 GPS보드 연결
U-Center 설치를 완료허였으면 U-center를 실행한 후 GPS 보드를 연결해준다.
왼쪽 상단의 Receiver-> Baudrate 를 누르고 사용하는 보드에 맞는 Baudrate를 설정해준다.
필자는 Ublox의 Zed-f9p를 사용하므로 Baudrate를 406'800으로 설정해 주었다.

이후 Receiver-> Connection에서 GPS보드를 연결한 포트를 찾아 연결해준다.
3. Update Rate 조정
본래 1Hz였던 수신 주기를 원하는 수신 주기로 변경해준다.
자율주행에는 1Hz가 적합하지 않으므로 자율주행에 적합한 8Hz로 변경해주겠다.
View-> Configuration View-> Rate로 들어간다.
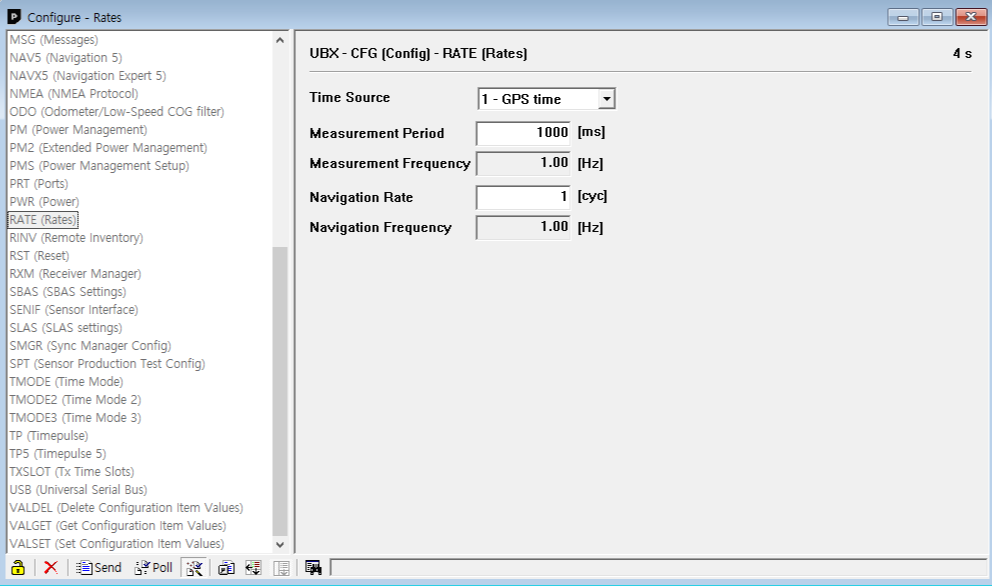
기본 Frequency가 1Hz로 설정되어있으므로 원하는 주기로 변경해준다.
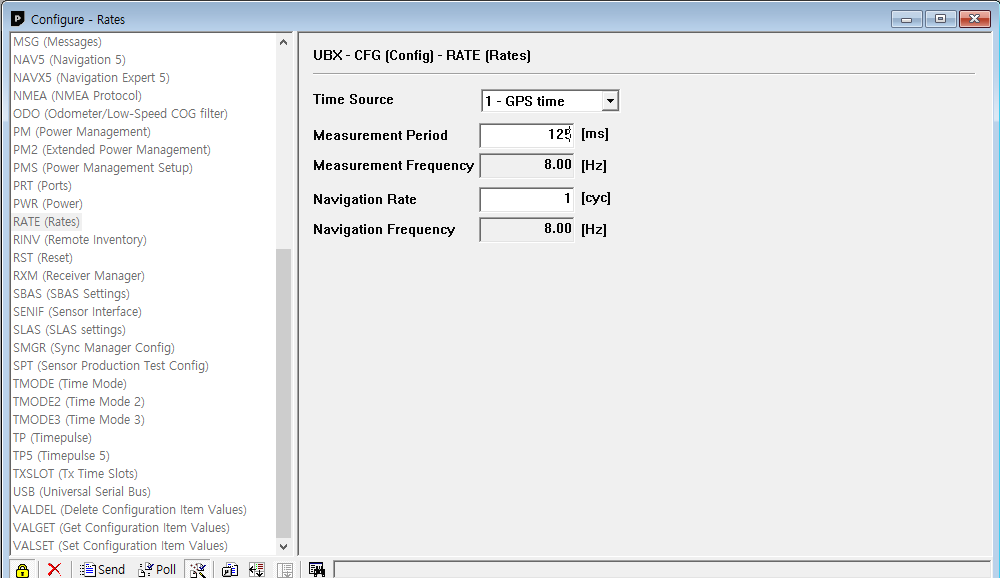
좌측 하단에 Send 버튼을 누른 후 X를 눌러 나오면 알림 창이 뜬다. Yes를 누르면 완료된다.
변경된 주기 정보는 GPS 보드 내에 저장되어있으므로
별도의 추가 설정 없이도 Linux 환경에서도 변경된 주기로 사용가능하다.
ublox ZED-f9p GPS(RTK) 사용
Ubuntu 18.04 ROS Melodic Ublox ZED-f9p 1. 보드 연결 (1) usb 케이블을 이용하여 GPS 보드와 PC를 연결해준다. (2) 기기에 할당된 이름을 확인해준다. (3) 기기에 권한을 부여해준다. $ ls /dev/tty* $ sudo ch..
hm02123.tistory.com
'ROS > GPS' 카테고리의 다른 글
| Mapviz에서 구글 위성 지도 사용 (2) | 2022.04.09 |
|---|---|
| Mapviz 사용법 (0) | 2022.04.08 |
| ROS Melodic에 Mapviz 설치 (0) | 2022.04.08 |
| Resolve gps-waypoint-based-autonomous-navigation-in-ros PKG Cmake Error (0) | 2022.03.29 |
| ublox ZED-f9p GPS(RTK) 사용 (2) | 2022.02.01 |